1.0 Introduction
When ChatGPT was launched in late 2022, artificial intelligence suddenly became a household topic. Before that moment, AI certainly existed, but it largely remained invisible to the average person. Researchers built models. Businesses deployed recommendation engines, fraud detection systems, forecasting algorithms and optimization engines. Consumers unknowingly interacted with AI every day, but very few recognized it as AI.The arrival of conversational AI changed that forever. Today, ask almost anyone what AI is, and the answer is likely to include ChatGPT, Claude, Gemini, Grok or DeepSeek. For many people, AI has become synonymous with a chatbot.Ironically, chatbots represent only one branch of a much larger AI landscape.
Artificial intelligence has evolved through several generations over more than sixty years. Rule-based expert systems dominated the 1980s. Statistical machine learning transformed business decision making during the 1990s and early 2000s. Deep learning revolutionised perception problems such as computer vision and speech recognition during the 2010s. Generative AI has simply become the latest and most visible chapter in that journey.What makes this wave different is not merely the technology. It is accessibility.For the first time, AI became directly useful to almost everyone. A student can summarise research papers. A lawyer can draft contracts. A marketer can generate campaign ideas. A programmer can write code. A manager can analyse a spreadsheet. AI moved from being an invisible engine inside software to becoming a visible collaborator.
This transformation was amplified by intuitive conversational interfaces, relentless media attention, significant investment by technology companies, government initiatives, viral demonstrations, fears about job displacement, and endless discussions about AGI (artificial general intelligence), SSI ( Safe super intelligence) etc. Whether optimistic or skeptical, everyone suddenly had an opinion about AI. This democratization of AI is undoubtedly one of the greatest technological achievements of our time.
Yet it has also produced one of the biggest misconceptions. Many organizations have unconsciously started believing that every business problem deserves a Generative AI solution. Today it is not uncommon to hear questions such as:
- “Which frontier model will we use for this use case?”
- “Can we put an agent here?”
- “Can we use autonomous agents ?”

Notice what is missing from these questions. Nobody first asks whether AI is even required. Nobody asks whether traditional automation would solve the problem more effectively. Nobody asks whether a predictive machine learning model would produce better business outcomes. The technology has become the starting point instead of the business problem.
The flip side of this democratization is an epidemic of corporate FOMO (Fear Of Missing Out). Suddenly, building a product or service without an “AI” sticker on it is deemed uncool or obsolete. Business leaders are feeling immense pressure from boards, investors, and competitors to infuse AI into every corner of their organizations, regardless of whether it actually adds value. Instead of analyzing business bottlenecks, leaders are chasing the latest technical fads. To understand how exhausting this has been, one only has to look at how rapidly the Generative AI landscape has evolved over the last few years, marked by overlapping phases of hype:
2.0 The Evolution of the Generative AI Era
Although Generative AI is only a few years old, its ecosystem has evolved remarkably quickly. Every six to twelve months, a new paradigm has emerged, each addressing shortcomings of the previous one.

Phase 1 — The Prompt Engineering Era (2022–2023)
The first challenge was simply learning how to communicate effectively with large language models.Prompt engineering, chain-of-thought prompting, few-shot prompting, role prompting and structured prompts became popular. The belief was that better prompts would solve almost every problem.The limitation soon became obvious. LLMs only knew what they had learned during training.
Phase 2 — The Grounding and RAG Era (2023–2024)
Businesses wanted models to answer questions using their own documents rather than public knowledge. This led to Retrieval-Augmented Generation (RAG), embeddings, vector databases and semantic search. The model became knowledgeable about enterprise data without retraining.Yet another limitation emerged. Knowing information was different from actually performing work.
Phase 3 — The Workflow Era (2024)
Organizations started embedding LLMs inside business workflows. Instead of one isolated prompt, AI became one step within a larger business process. Function calling, structured outputs, workflow orchestration frameworks such as LangChain and LlamaIndex became increasingly important. Soon businesses realized that workflows were becoming increasingly dynamic.
Phase 4 — The Agentic Era (2024–2025)
Instead of prescribing every step, businesses began assigning goals. AI agents could decide which tools to call, when to retrieve information, when to reason, and how to execute multi-step tasks. Frameworks such as LangGraph, AutoGen, CrewAI and similar agent frameworks gained popularity. However, agents needed standardized ways to communicate with external systems.
Phase 5 — The Protocol Era (2025)
The ecosystem began converging around standardised communication protocols. Rather than building custom integrations for every tool, protocols such as Model Context Protocol (MCP) enabled AI systems to interact with external applications through standardised interfaces. At the same time, agent-to-agent communication protocols (A2A and related efforts) emerged to allow multiple AI systems to collaborate. The challenge then shifted from coordination to autonomy
Phase 6 — The Autonomous Agentic Systems Era (Emerging)
The latest vision is not simply AI assisting people but AI managing significant portions of business processes independently.These systems monitor workflows, plan actions, invoke tools, collaborate with other agents, escalate exceptions to humans and continuously improve. This represents the beginning of AI-powered digital workforces rather than isolated assistants.
Notice that each phase did not replace the previous one. It simply added another layer.
- Prompting still matters.
- RAG still matters.
- Workflows still matter.
- Agents still matter.
- Protocols still matter.
Many organisations incorrectly assume the newest technology replaces everything that came before it. One unfortunate consequence of the excitement surrounding Generative AI has been the neglect of other forms of intelligence. Many business problems are fundamentally prediction problems rather than generation problems. Others are optimisation problems. Many require deterministic automation rather than probabilistic reasoning. Some simply require better process design. Yet organisations frequently force Generative AI into problems where predictive machine learning, optimisation algorithms, business rules or conventional automation would produce better outcomes at lower cost and greater reliability.
The result is predictable.

- Expensive proofs of concept.
- Escalating infrastructure costs.
- Disappointed business sponsors.
- Little measurable business value.
A 2025 MIT study found that around 95% of enterprise generative‑AI pilots delivered no measurable business impact — is a symptom of exactly this: the indiscriminate pursuit of hype, combined with a lack of judgement about what to use where. That judgement, I would argue, is the very essence of AI literacy: knowing when to reach for generative AI, when for predictive AI, when for simple automation, and when for plain human expertise.
This series is an attempt to cut through the myth surrounding AI and lay down some ground rules for applying the right technology to the right problem. I therefore present my multi‑part guide, christened The 10 Commandments of AI in Business. These will be covered over the next 10 weeks. Let us now look at the commandments at a higher level and what will be covered each week under a commandment.
3.0 The 10 Commandments
Commandment 1 — “The Process Is Sovereign; Thou shall not put Technology Before It”
Essence: Start with the business process, not the technology. AI must serve throughput — never throttle it.

Topics covered:
- How to take a process‑first view before you even name a solution.
- Decomposing a process into its stages, decision points and handoffs — and finding the true bottleneck (Theory of Constraints applied to AI).
- A decision lens for each stage: does it need generative AI, predictive AI, automation, or a human?
- Local vs. global optimisation: does inserting AI at one stage actually improve end‑to‑end throughput, or just speed up a step that isn’t the bottleneck?
- Spotting where AI adds friction (extra review, hallucination checks, latency) rather than value.

Commandment 2 — “Thou Shalt Not Invoke Agents in Vain”
Essence: Don’t reach for agents and multi‑agent systems for problems that a script, a workflow, or a single prompt could solve.
Topics covered:
- The tell‑tale signs a problem genuinely needs agentic autonomy (dynamic, multi‑step, uncertain, requires tool use and adaptive planning).
- The tell‑tale signs it does not (deterministic, linear, predictable → a workflow wins).
- The hidden costs of agents: latency, unpredictability, debugging difficulty, and runaway token spend.
- A simple “agent vs. workflow” decision checklist for leaders.
- Case studies where an agent was overkill — and what should have been used instead.
Commandment 3 — “Honour the Humble LLM Workflow”
Essence: A great many problems are solved by a single well‑crafted LLM call or a simple, deterministic chain. Respect the simple.

Topics covered:
- The highest‑ROI, lowest‑risk LLM patterns: summarisation, extraction, classification, drafting, translation, reformatting.
- Where a single prompt or fixed chain reliably beats an agent.
- Designing repeatable and reliable prompt‑based workflows (structured outputs, templates, validation).
- Building guardrails and simple evaluations so a “simple” workflow stays trustworthy in production.
- Real examples: contract summarisation, ticket triage, meeting‑note extraction.

Commandment 4 — “Honor Predictive AI and Automation as Thy Elders”
Essence: The older, proven techniques — machine learning, forecasting, rules, RPA — are frequently the correct and cheaper answer. Don’t disown them for being unfashionable.
Topics covered:
- Recognising a “predictive” problem masquerading as a “generative” one (forecasting, churn, fraud, credit scoring, demand planning, recommendations).
- When no AI at all is the right answer — simple rules, RPA, or a database query.
- The advantages predictive AI still holds: accuracy, cost, speed, explainability, auditability.
- A field guide to spotting generative‑AI “force‑fit” failures.
- Case studies where switching from GenAI back to predictive AI (or plain automation) delivered the actual result.
Commandment 5 — “Thou Shalt Not Slay Thy Token Budget”
Essence: Don’t burn compute and money on heavyweight implementations when grounding and retrieval do the job for a fraction of the cost.

Topics covered:
- When RAG is the right pattern (proprietary knowledge, freshness, hallucination reduction) — and when it isn’t.
- The cost/benefit trade‑off: RAG vs. fine‑tuning vs. long‑context stuffing.
- Managing token and inference cost in production — caching, retrieval, chunking, model tiering.
- Applying RAG to real scenarios: support knowledge bases, policy Q&A, internal document search.
- A simple “cost per successful outcome” way to think about implementation choices.

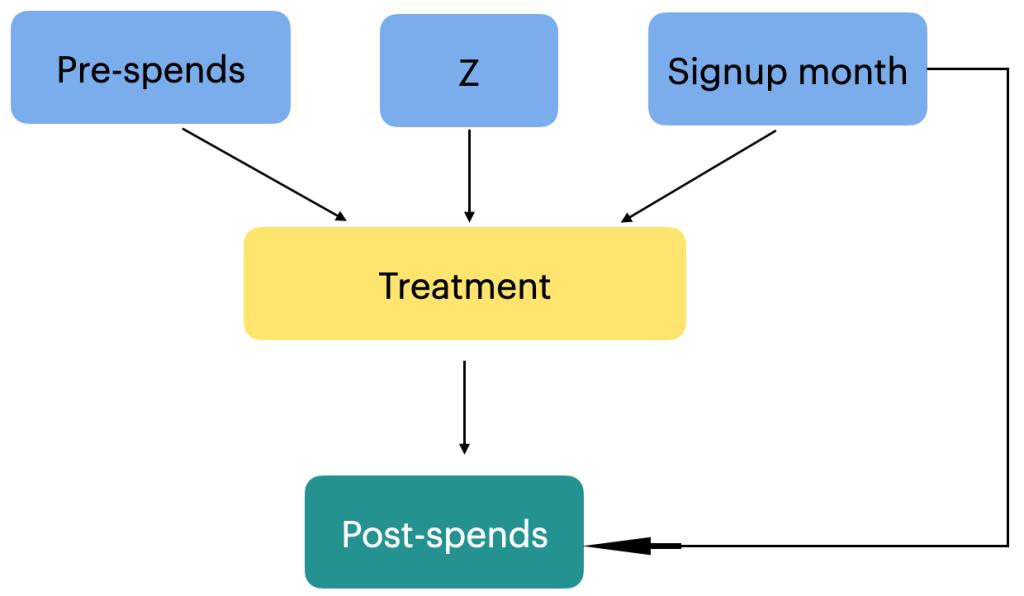
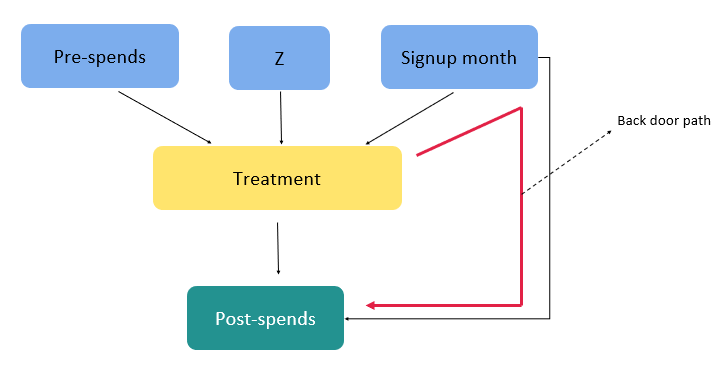
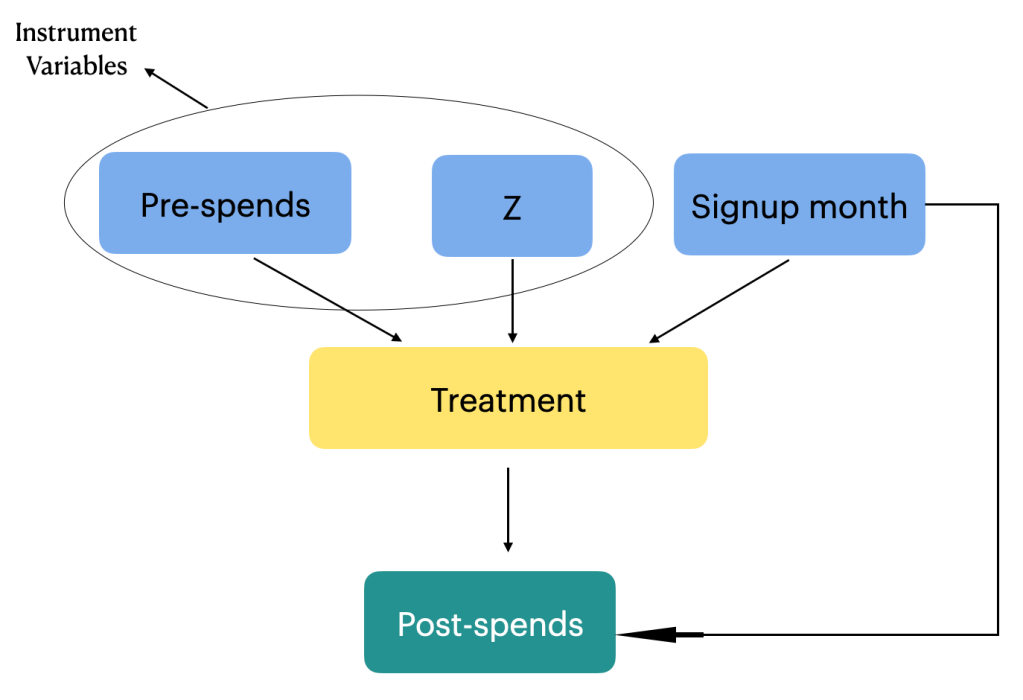
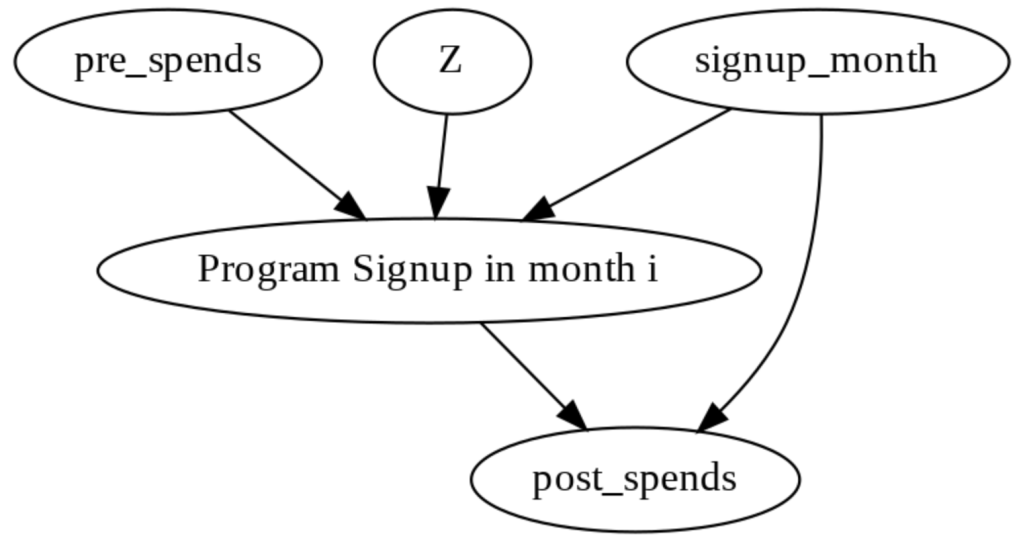
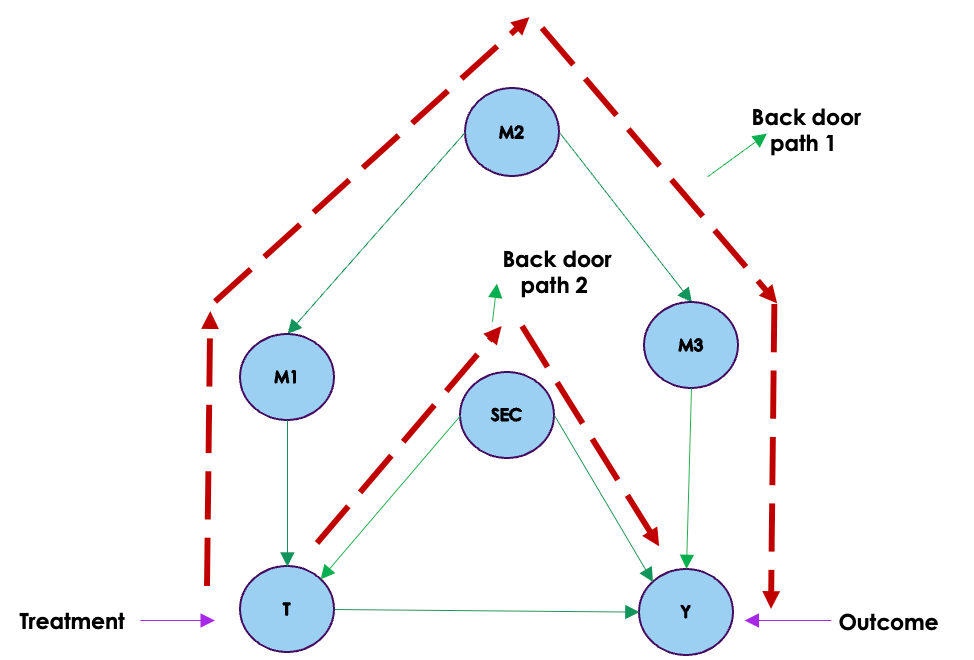
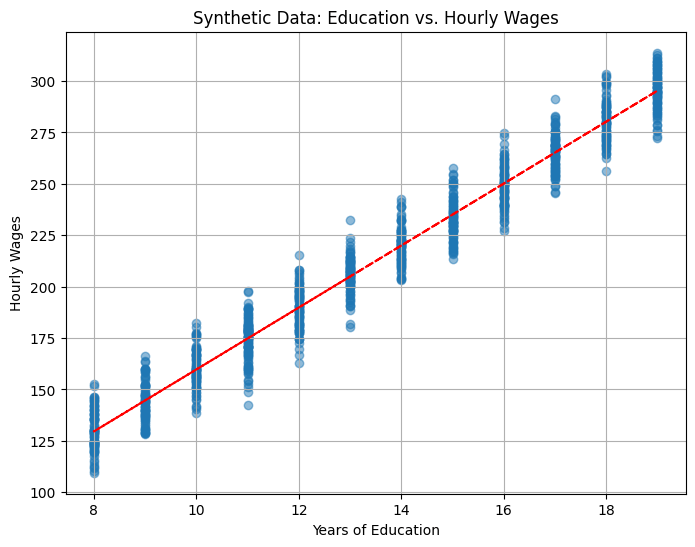
Commandment 6 — “Be Faithful to Causation; Be Not Seduced by Correlation”
Essence: For decisions about interventions — “what happens if we change X?” — correlation‑based models mislead. You need causal reasoning.
Topics covered:
- Where correlation‑based ML quietly produces bad business decisions.
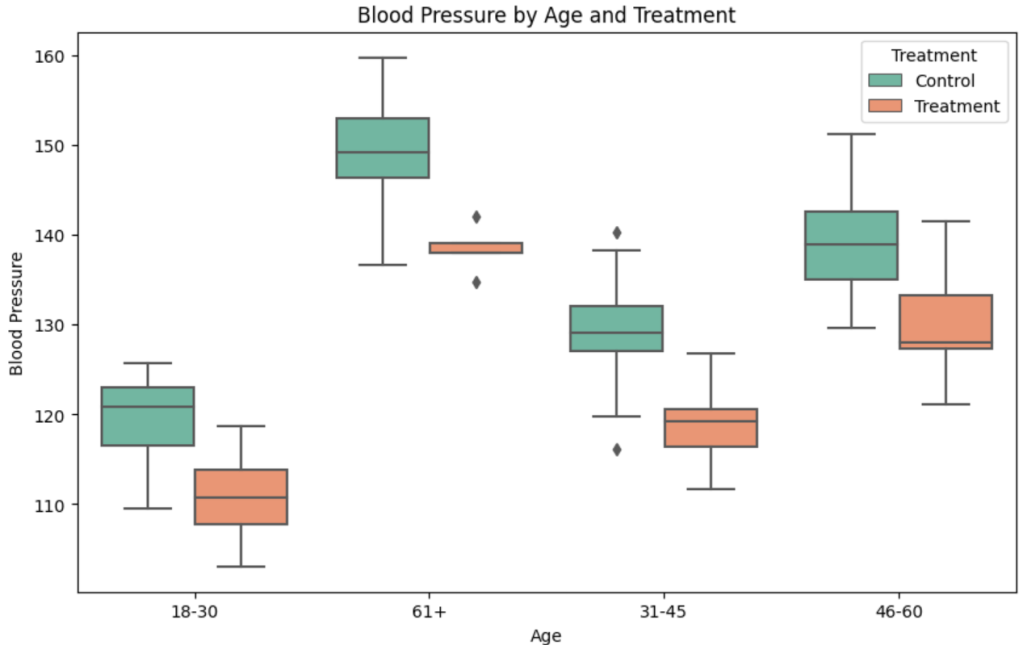
- The questions causal AI answers that predictive AI cannot (“If we cut price, what causes what?”).
- High‑value business scenarios: pricing, marketing‑spend attribution, treatment/uplift modelling, policy and process changes.
- How to know when a decision deserves the investment in causal methods.
- Combining causal reasoning with predictive and generative AI in a single decision workflow.
Commandment 7 — “Thou Shalt Not Steal the Work That Rightly Belongs to Another Tool”
Essence: No single technology should “steal” the work another does better. Compose the right blend — generative, predictive, automation, causal, and human — across the process.

Topics covered:
- How to architect a composite solution across a real end‑to‑end process (e.g., an insurance‑claim or loan‑origination flow using OCR + predictive risk model + RAG + a human approver + an LLM to draft the response).
- A mapping method: for each process step, assign the tool with the best cost/accuracy/risk profile.
- Where the human must stay in the loop, and where humans should be removed.
- Orchestration patterns for combining tools reliably.
- Anti‑patterns: the “one glamorous tool for everything” trap.

Commandment 8 — “Thou Shalt Not Let Thy Autonomous Agent Bear False Witness”
Essence: Autonomous agents can be powerful — but the more autonomy you grant, the more you must guard against them acting confidently on false information. Autonomy demands accountability.
Topics covered:
- When full autonomy is genuinely appropriate — and when a human checkpoint is non‑negotiable.
- Designing guardrails, verification, and “trust boundaries” for autonomous agents.
- Hallucination and error containment: how a wrong output becomes a wrong action, and how to prevent it.
- Human‑in‑the‑loop vs. human‑on‑the‑loop vs. fully autonomous — and how to choose.
- Auditability, traceability and accountability: who is responsible when the agent gets it wrong?
- Rollout strategy: shadow mode → assisted → supervised autonomy → full autonomy.
Commandment 9 — “Thou Shalt Not Covet Only the Frontier Models”
Essence: You don’t always need the biggest, most expensive frontier model. A smaller, specialised, or locally hosted model may serve the use case better and cheaper.

Topics covered:
- Determining whether a use case actually needs frontier‑model capability.
- Small / specialised / fine‑tuned models: when they win on cost, speed, privacy and control.
- Local and on‑premise models: when data sensitivity or regulation makes them the only right choice.
- A practical framework for right‑sizing the model to the task (and mixing model tiers within one workflow).
- Total‑cost‑of‑ownership: API vs. self‑hosted vs. fine‑tuned.

Commandment 10 — “Thou Shalt Not Covet Thy Competitor’s AI”
Essence: Don’t chase your rival’s AI announcements out of FOMO ( Fear of missing out). Prove the cost‑benefit in your context before joining the race.
Topics covered:
- How to build a cost‑benefit case for an AI initiative before funding it.
- Defining and measuring the actual business benefit (and avoiding vanity metrics).
- A pragmatic ROI framework: cost per outcome, payback period, risk‑adjusted value.
- Why a competitor’s implementation may be wrong for your process, data, or margins.
- Build vs. buy vs. wait: how to time your investment.
- Killing projects gracefully — how to run POCs that fail fast and cheap.
4.0 Where this leaves us
If you take away just one idea from this introduction, let it be this: AI literacy is not knowing the latest technology — it is knowing which technology to reach for, and when.
The generative-AI hype cycle — from prompting, to grounding, to workflows, to agents, to protocols, to today’s autonomous agents has trained us to believe that each new wave is a panacea for everything that came before. It isn’t. Every one of these advances is a genuine capability and a genuine trap, depending entirely on whether it fits the problem in front of you. Meanwhile, the unglamorous, battle-tested tools predictive AI, optimisation, plain automation, and irreplaceable human expertise quietly solve the majority of real business problems, and are being sidelined precisely because they aren’t fashionable.
The 10 Commandments we’ve just surveyed are not really about technology at all. They are about restraint, judgement, and matching the tool to the task:
- Start with the process, not the technology (1).
- Don’t reach for agents — or autonomous agents — when something simpler and more reliable will do (2, 8).
- Respect the humble LLM workflow and the elders — predictive AI and automation (3, 4).
- Guard your budget with grounding and retrieval before expensive builds (5).
- Reason about causation, not just correlation, when decisions involve intervention (6).
- Compose the right blend of tools across a process rather than forcing one everywhere (7).
- Don’t covet the frontier model — or your competitor’s AI — until you’ve proven the fit and the cost-benefit in your context (9, 10).
Together, they form a single discipline: decide where AI belongs, on purpose, with evidence not out of hype or fear of missing out.
Over the coming posts, we’ll take each commandment in turn and make it practical with real processes, real decision frameworks, and the checklists you can carry into your next meeting. This series is written for the leader who is tired of being sold the next fad, and who wants instead a durable way of thinking that will outlast whatever the industry is excited about this quarter.
The commandments are the map. Now let’s start walking.
Next up — Commandment 1: “The Process Is Sovereign; Thou Shalt Not Put Technology Before It.”
We’ll replay a meeting you’ve almost certainly lived through — the one where someone says “why don’t we just put an AI agent on it?” — and show why that single sentence is where most AI projects are quietly doomed. Then we’ll take one framework, run it across three real processes (in marketing, manufacturing, and HR), and watch it produce three completely different answers — proving that generative AI, the technology everyone walks in demanding, is only the right choice in one of them.