This is the third post of the series were we build a road sign and pothole detection application. We will be using multiple methods through out this series which includes computer vision techniques using opencv, annotating images using labelImg, mastering Tensorflow object detection API, Training objection detection using transfer learning, Object detection on video etc. This series will be split across 9 posts.
1. Introduction to object detection
2. Data set preperation and annotation Using labelImg
3. Building your object detection model from scratch using Image pyramids and Sliding window ( This post )
4. Building your road pothole detector using RCNN
5. Building your road pothole detector using YOLO
6. Building you road pothole detector using Tensorflow object detection API
7. Building your video analytics application for detecting potholes
8. Deploying your video analytics application for detection of potholes
In this post we build a custom object detector from scratch progressively using different methods like pyramid segmentation, sliding window and non maxima suppression. These methods are legacy methods which lays the foundation to many of the modern object detection methods. Let us look at the processes which will be covered in building an object detector from scratch.
- Prepare the train and test sets from the annotated images ( Covered in the last post)
- Build a classifier for detecting potholes
- Build the inference pipeline using image pyramids and sliding window techniques to predict bounding boxes for potholes
- Optimise the bounding boxes using Non Maxima suppression.
We will be covering all the topics from step 2 in this post. These posts are heavily inspired by the following posts.
Let us dive in.
Training a classifier on the data
In the last post we prepared our training data from positive and negative examples and then saved the data in h5py format. In this post we will use that data to build our pothole classifier. The classifier we will be building is a binary classifier which has a positive class and a negative class. We will be training this classifier using a SVM model. The choice of SVM model is based on some earlier work which is done in this space, however I would urge you to experiment with other classification models as well.
We will start off from where we stopped in the last section. We will read the database from disk and extract the labels and data
# Read the data base from disk
db = h5py.File(outputPath, "r")
# Extract the labels and data
(labels, data) = (db["pothole_features_all"][:, 0], db["pothole_features_all"][:, 1:])
# Close the data base
db.close()
print(labels.shape)
print(data.shape)

We will now use the data and labels to build the classifier
# Build the SVM model
model = SVC(kernel="linear", C=0.01, probability=True, random_state=123)
model.fit(data, labels)
Once the model is fit we will save the model as a pickle file in the output folder.
# Save the model in the output folder
modelPath = 'data/models/model.cpickle'
f = open(modelPath, "wb")
f.write(pickle.dumps(model))
f.close()
Please remember to create the 'models' folder in your local drive in the 'data' folder before saving the model. Once the model is saved you will be able to see the model pickle file within the path you specified.
Now that we have build the classifier, we will use this classifier for object detection in the next section. We will be covering two important concepts in the next section which is important for object detection, Image pyramids and Sliding windows. Let us get familiar with those concepts first.
Image Pyramids and Sliding window techniques
Let us try to understand the concept of image pyramids with an example. Let us assume that we have a window of fixed size and potholes are detected only if they fit perfectly inside the window. Let us look at how well the potholes are detected when using a fixed size window. Take the case of layer1 of the image below. We can see that the fixed sized window was able to detect one of the potholes which was further down the road as it fit well within the window size, however the bigger pothole which is at the near end the image is not detected because the window was obviously smaller than size of the pothole.
As a way to solve this, let us progressively reduce the size of the image, and try to fit the potholes to the fixed window size, as shown in the figure below. With the reduction in size of the image, the object we want to detect also reduces in size. Since our detection window remains the same, we are able to detect more potholes including the biggest one, when the image sizes are reduced. Thereby we will be able to detect most of the potholes which otherwise would not have been possible with a fixed size window and a constant size image. This is the concept behind image pyramids.

The name image pyramids signifies the fact that, if the scaled images are stacked vertically, then it will fit inside a pyramid as shown in the below figure.
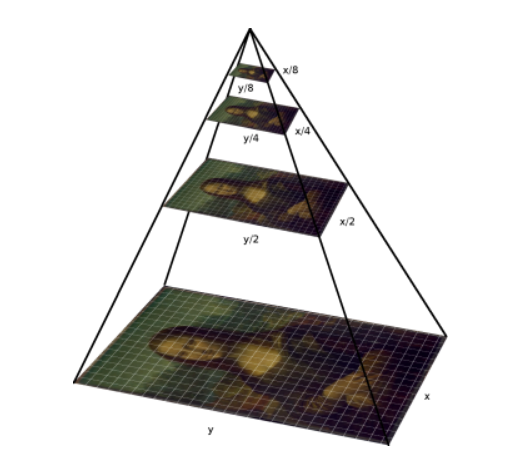
The implementation of image pyramids can be done easily using Sklearn. There are many different types of image pyramid implementation. Some of the prominent ones are Gaussian pyramids and Laplacian pyramids. You can read about these pyramids in the link give here. Let us quickly look at the implementation of of pyramids.
from skimage.transform import pyramid_gaussian
for imgPath in allFiles[-2:-1]:
# Read the image
image = cv2.imread(imgPath)
# loop over the layers of the image pyramid and display them
for (i, layer) in enumerate(pyramid_gaussian(image, downscale=1.2)):
# Break the loop if the image size is less than our window size
if layer.shape[1] < 80 or layer.shape[0] < 40:
break
print(layer.shape)

From the output we can see how the images are scaled down progressively.
Having see the image pyramids, its time to discuss about sliding window. Sliding windows are effective methods to identify objects in an image at various scales and locations. As the name suggests, this method involves a window of standard length and width which slides accross an image to extract features. These features will be used in a classifier to identify object of interest. Let us look at the code block below to understand the dynamics of the sliding window method.
# Read the image
image = cv2.imread(allFiles[-2])
# Define the window size
windowSize = [80,40]
# Define the step size
stepSize = 40
# slide a window across the image
for y in range(0, image.shape[0], stepSize):
for x in range(0, image.shape[1], stepSize):
# Clone the image
clone = image.copy()
# Draw a rectangle on the image
cv2.rectangle(clone, (x, y), (x + windowSize[0], y + windowSize[1]), (0, 255, 0), 2)
plt.imshow()
To implement the sliding window we need to understand some of the parameters which are used. The first is the window size, which is the dimension of the fixed window we would be sliding accross the image. We earlier calculated the size of this window to be [80,40] which was the average size of a pothole in our distribution. The second parameter is the step size. A step size is the number of pixels we need to step to move the fixed window accross the image. Smaller the step size, we will have to move through more pixels and vice-versa. We dont want to slide through every pixel and definitely dont want to skip important features, and therefore the step size is a necessary parameter. An ideal step size would depend on the image size. For our case let us experiment with the ‘y’ cordinate size of our fixed window which is 40. I would encourage to experiment with different step sizes and observe the results before finalising the step size.
To implement this method, we first iterates through the vertical distance starting from 0 to the height of the image with increments of the stepsize. We have an inner iterative loop which loops through the horizontal direction ranging from 0 to the width of the image with increments of stepsize. For each of these iterations we capture the x and y cordinates and then extract a rectangle with the same shape of the fixed window size. In the above implementation we are only drawing a rectangle on the image to understand the dynamics. However when we implement this along with image pyramids, we will crop an image size with the dimension of the window size as we slide accross the image. Let us see some of the sample outputs of the sliding window.
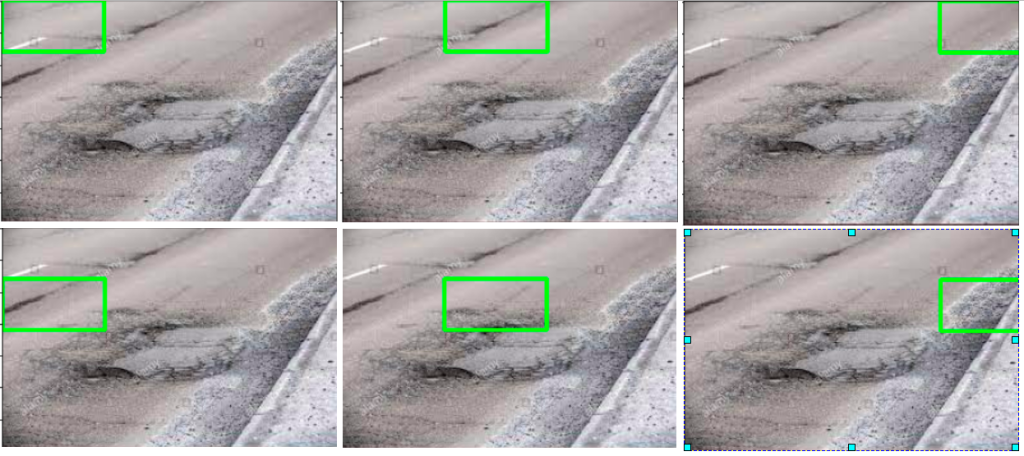
From the above output we can see how the fixed window slides accross the image both horizontally and vertically with a step size to extract features from the image of the same size as the fixed window.
So far we have seen the pyramid and the sliding window implementations independently. These two methods have to be integrated to use it as an object detector. However for integrating them we need to convert the sliding window method into a function. Let us look at the function to implement sliding windows.
# Function to implement sliding window
def slidingWindow(image, stepSize, windowSize):
# slide a window across the image
for y in range(0, image.shape[0], stepSize):
for x in range(0, image.shape[1], stepSize):
# yield the current window
yield (x, y, image[y:y + windowSize[1], x:x + windowSize[0]])
The function is not very different from what we implemented earlier. The only difference is as the output we yield a tuple of the x,y cordinates and the crop of the image of the same size as the window Size. Next we will see how we integrate this function with the image pyramids to implement our custom object detector.
Building the object detector
Its now time to bring all what we defined into creating our object detector. As a first step let us load the model which we saved during the training phase
# Listing the path were we stored the model
modelPath = 'data/models/model.cpickle'
# Loading the model we trained earlier
model = pickle.loads(open(modelPath, "rb").read())
model
Now let us look at the complete code to implement our object detector
# Initialise lists to store the bounding boxes and probabilities
boxes = []
probs = []
# Define the HOG parameters
orientations=12
pixelsPerCell=(4, 4)
cellsPerBlock=(2, 2)
# Define the fixed window size
windowSize=(80,40)
# Pick a random image from the image path to check our prediction
imgPath = sample(allFiles,1)[0]
# Read the image
image = cv2.imread(imgPath)
# Converting the image to grayscale
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# loop over the image pyramid
for (i, layer) in enumerate(pyramid_gaussian(image, downscale=1.2)):
# Identify the current scale of the image
scale = gray.shape[0] / float(layer.shape[0])
# loop over the sliding window for each layer of the pyramid
for (x, y, window) in slidingWindow(layer, stepSize=40, windowSize=(80,40)):
# if the current window does not meet our desired window size, ignore it
if window.shape[0] != windowSize[1] or window.shape[1] != windowSize[0]:
continue
# Let us now extract the hog features of this window within the image
feat = hogFeatures(window,orientations,pixelsPerCell,cellsPerBlock,normalize=True).reshape(1,-1)
# Get the prediction probabilities for the positive class ( potholesf)
prob = model.predict_proba(feat)[0][1]
# Check if the probability is greater than a threshold probability
if prob > 0.95:
# Extract (x, y)-coordinates of the bounding box using the current scale
# Starting coordinates
(startX, startY) = (int(scale * x), int(scale * y))
# Ending coordinates
endX = int(startX + (scale * windowSize[0]))
endY = int(startY + (scale * windowSize[1]))
# update the list of bounding boxes and probabilities
boxes.append((startX, startY, endX, endY))
probs.append(prob)
# loop over the bounding boxes and draw them
for (startX, startY, endX, endY) in boxes:
cv2.rectangle(image, (startX, startY), (endX, endY), (0, 0, 255), 2)
plt.imshow(image,aspect='equal')
plt.show()
To start of we initialise two lists in lines 2-3 where we will store the bounding box coordinates and also the probabilities which indicates the confidence about detecting potholes in the image.
We also define some important parameters which are required for HOG feature extraction method in lines 5-7
- orientations
- pixels per Cell
- Cells per block
We also define the size of our fixed window in line 9
To test our process, we randomly sample an image from the list of images we have and then convert the image into gray scale in lines 11-15.
We then start the iterative loop to implement the image pyramids in line 17. For each iteration the input image is scaled down as per the scaling factor we defined.Next we calculate the running scale of the image in line 19. The scale would always be the original shape divided by the scaled down image. We need to find the scale to blow up the x,y coordinates to the orginal size of the image later on.
Next we start the sliding window implementation in line 21. We provide the scaled down version of the image as the input along with the stepSize and the window size. The step size is the parameter which indicates by how much the window has to slide accross the original image. The window size indicates the size of the sliding window. We saw the mechanics of these when we looked at the sliding window function.
In lines 23-24 we ensure that we only take images, which meets our minimum size specification.For any image which passes the minimum size specification, HOG features are extracted in line 26. On the extracted HOG features, we do a prediction in line 28. The prediction gives the probability whether the image is a pothole or not. We extract only probability of the positive class. We then take only those images were the probability is greater than a threshold we have defined in line 31. We give a high threshold because, our distribution of both the positive and negative images are very similar. So to ensure that we get only the potholes, we given a higher threshold. The threshold has been arrived at after fair bit of experimentation. I would encourage you to try out with different thresholds before finalising the threshold you want.
Once we get the predictions, we take those x and y cordinates and then blow it to the original size using the scale we earlier calculated in lines 34-37. We find the starting cordinates and the ending cordinates and then append those coordinates in the lists we defined, in lines 39-40.
In lines 43-47, we loop through each of the coordinates and draw bounding boxes around the image.






Let us look at the output we have got, we can see that there are multiple bounding boxes created around the area were there are potholes. We can be happy that the object detector is doing its job by localising around the area around a pothole in most of the cases. However there are examples where the detector has detected objects other than potholes. We will come to that issue later. Let us first address another important issue.
All the images have multiple overlapping bounding boxes. Having a lot of bounding boxes can sometimes be cumbersome say if we want to calculate the area where the pot hole is present. We need to find a way to reduce the number of overlapping bounding boxes. This is were we use a technique called Non Maxima suppression. The objective of Non maxima suppression is to combine bounding boxes with significant overalp and get a single bounding box. The method which we would be implementing is inspired from this post
Non Maxima Suppression
We would be implementing a customised method of the non maxima suppression implementation. We will be implementing it through a function.
def maxOverlap(boxes):
'''
boxes : This is the cordinates of the boxes which have the object
returns : A list of boxes which do not have much overlap
'''
# Convert the bounding boxes into an array
boxes = np.array(boxes)
# Initialise a box to pick the ids of the selected boxes and include the largest box
selected = []
# Continue the loop till the number of ids remaining in the box is greater than 1
while len(boxes) > 1:
# First calculate the area of the bounding boxes
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
area = (x2 - x1) * (y2 - y1)
# Sort the bounding boxes based on its area
ids = np.argsort(area)
#print('ids',ids)
# Take the coordinates of the box with the largest area
lx1 = boxes[ids[-1], 0]
ly1 = boxes[ids[-1], 1]
lx2 = boxes[ids[-1], 2]
ly2 = boxes[ids[-1], 3]
# Include the largest box into the selected list
selected.append(boxes[ids[-1]].tolist())
# Initialise a list for getting those ids that needs to be removed.
remove = []
remove.append(ids[-1])
# We loop through each of the other boxes and find the overlap of the boxes with the largest box
for id in ids[:-1]:
#print('id',id)
# The maximum of the starting x cordinate is where the overlap along width starts
ox1 = np.maximum(lx1, boxes[id,0])
# The maximum of the starting y cordinate is where the overlap along height starts
oy1 = np.maximum(ly1, boxes[id,1])
# The minimum of the ending x cordinate is where the overlap along width ends
ox2 = np.minimum(lx2, boxes[id,2])
# The minimum of the ending y cordinate is where the overlap along height ends
oy2 = np.minimum(ly2, boxes[id,3])
# Find area of the overlapping coordinates
oa = (ox2 - ox1) * (oy2 - oy1)
# Find the ratio of overlapping area of the smaller box with respect to its original area
olRatio = oa/area[id]
# If the overlap is greater than threshold include the id in the remove list
if olRatio > 0.50:
remove.append(id)
# Remove those ids from the original boxes
boxes = np.delete(boxes, remove,axis = 0)
# Break the while loop if nothing to remove
if len(remove) == 0:
break
# Append the remaining boxes to the selected
for i in range(len(boxes)):
selected.append(boxes[i].tolist())
return np.array(selected)
The input to the function are the bounding boxes we got after our prediction. Let me give a big picture of what this implementation is all about. In this implementation we start with the box with the largest area and progressively eliminate boxes which have considerable overlap with the largest box. We then take the remaining boxes after elimination and the repeat the process of elimination till we get to the minimum number of boxes. Let us now see this implementation in the code above.
In line 7, we convert the bounding boxes into an numpy array and the initialise a list to store the bounding boxes we want to return in line 9.
Next in line 11, we start the continues loop for elimination of the boxes till the number of boxes which remain is less than 2.
In lines 13-17, we calculate the area of all the bounding boxes and then sort them in ascending order in line 19.
We then take the cordinates of the box with the largest area in lines 22-25 and then append the largest box to the selection list in line 27. We initialise a new list for the boxes which needs to be removed and then include the largest box in the removal list in line 30.
We then start another iterative loop to find the overlap of the other bounding boxes with the largest box in line 32. In lines 35-43, we find the coordinates of the overlapping portion of each of the other boxes with the largest box and the take the area of the overlapping portion. In line 45 we find the ratio of the overlapping area to the original area of the bounding box which we iterate through. If the ratio is larger than a threshold value, we include that box to the removal list in lines 47-48 as this has good overlap with the largest box. After iterating through all the boxes in the list, we will get a list of boxes which has good overlap with the largest box. We then remove all those overlapping boxes and the current largest box from the original list of boxes in line 50. We continue this process till there are no more boxes to be removed. Finally we add the last remaining box to the selected list and then return the selection.
Let us implement this function and observe the result
# Get the selected list
selected = maxOverlap(boxes)
Now let us look at different examples after non maxima suppression.
# Get the image again
image = cv2.imread(imgPath)
# Make a copy of the image
clone = image.copy()
for (startX, startY, endX, endY) in selected:
cv2.rectangle(clone, (startX, startY), (endX, endY), (0, 255, 0), 2)
plt.imshow(clone,aspect='equal')
plt.show()

We can see that the bounding boxes are considerably reduced using our non maxima suppression implementation.
Improvement Opportunities
Eventhough we have got reasonable detection effectiveness, is the model we built perfect ? Absolutely not. Let us look at some of the major pitfalls
Misclassifications of objects :
From the outputs, we can see that we have misclassified some of the objects.

Most of the misclassifications we have seen are for vegetation. There are also cases were road signs are also misclassified as potholes.
A major reason we have mis classification is because our training data is limited. We used only 19 positive images and 20 negative examples. Which is a very small data set for tasks like this. Considering the fact that the data set is limited the classifier has done a decent job. Also for negative images, we need to include some more variety, like get some road signs, vehicles, vegetation etc labelled as negative images. So with more positive images and more negative images with little more variety of objects that are likely to be found on roads will improve the classification accuracy of the classifier.
Another strategy is to experiment with different types of classifiers. In our example we used a SVM classifier. It would be worthwhile to use other binary classifiers starting from Logistic regression, Naive Bayes, Random forest, XG boost etc. I would encourage you to try out with different classifiers and then verify the results.
Non detection of positive classes
Along with misclassifications, we have also seen non detection of positive classes.

As seen from the examples, we can see that there has been non detection in cases of potholes with water in it. In addition some of the potholes which are further along the road are not detected.
These problems again can be corrected by including more variety in the positive images, by including potholes with water in it. It will also help to include images with potholes further away along the road. The other solution is to preprocess images with different techniques like smoothing and blurring, thresholding, gradient and edge detection, contours, histograms etc. These methods will help in highliging the areas with potholes which will help in better detection. In addition, increasing the number of positive examples will also help in addressing the problems associated with non detection.
What Next ?
The idea behind this post was to give you a perspective in building an object detector from scratch. This was also an attempt to give an experience in working in cases where the data sets are limited and where you have to create the necessary data sets. I believe these exercises will equip you will capabilities to deal with such issues in your projects.
Now that you have seen the basic grounds up approach, it is time to use this experience to learn more state of the art techniques. In the next post we will start with more advanced techniques. We will also be using transfer learning techniques extensively from the next post. In the next post we will cover object detection using RCNN.
To be notified of the next post please subscribe to this blog post .You can also subscribe to our Youtube channel for all the videos related to this series.
You can also access the code base for this series from the following git hub link
Do you want to Climb the Machine Learning Knowledge Pyramid ?
Knowledge acquisition is such a liberating experience. The more you invest in your knowledge enhacement, the more empowered you become. The best way to acquire knowledge is by practical application or learn by doing. If you are inspired by the prospect of being empowerd by practical knowledge in Machine learning, subscribe to our Youtube channel
I would also recommend two books I have co-authored. The first one is specialised in deep learning with practical hands on exercises and interactive video and audio aids for learning

This book is accessible using the following links
The Deep Learning Workshop on Amazon
The Deep Learning Workshop on Packt
The second book equips you with practical machine learning skill sets. The pedagogy is through practical interactive exercises and activities.

This book can be accessed using the following links
The Data Science Workshop on Amazon
The Data Science Workshop on Packt
Enjoy your learning experience and be empowered !!!!